Come favorire la manovrabilità del modello
A cura di Mario Sarti
Molti modelli dinamici navali, staticamente perfetti e rispondenti all’originale, una volta visti in vasca costringono a rivedere le proprie positive prime impressioni. I perché possono essere molteplici e di varia natura; luci, suoni, il modo di manovrare, la velocità, le onde che solleva, etc. In questa sede vorrei occuparmi sopratutto della manovrabilità e dinamica del modello; questi due aspetti sono essenzialmente legati ai motori ed al/ai timoni. In queste note parlerò esclusivamente di battelli a due o più motori.
Motori
Si deve scegliere con cura il loro dimensionamento ovvero numero minimo e massimo dei giri, il campo di tensione da utilizzare, il tipo di giunto con cui unirli agli assi e per ultimo il tipo di eliche, tre, quattro e più pale; un motore troppo veloce può rendere più smorzata l’azione del timone e meno naturale il movimento del battello.
Timone/Timoni
Può succedere che pur avendo rispettato misure e dimensioni il modello non risponde al meglio e nelle manovre non si comporta in maniera credibile; allora che fare? La prima cosa che viene in mente è di aumentare la dimensione del/dei timoni ma così si falsa il modello. D’altra parte cambiare i motori comporta dover ritoccare componente costosi e fastidiosi aggiustamenti alle strutture interne dello scafo.
Prendiamo in esame una tipologia di modelli molto vista in vasca ovvero i rimorchiatori; nella realtà sono mezzi da lavoro utilizzati all’interno dei porti quindi devono avere potenza e sopra tutto manovrabilità; con i doverosi aggiustamenti quanto posso suggerire è applicabile a qualsiasi modello navigante.
Dato per scontata la verifica del dimensionamento degli organi preposti al movimento, vediamo come poterli utilizzare per coadiuvare le manovre; ripeto che ovviamente quanto dirò è valido per modelli con due o più motori. Si possono esaminare varie opzioni, tutte legate ovviamente al movimento del timone: metodo “tank” ovvero il fermo di uno dei motori o l’inversione del moto di uno dei due motori (motori in fase), inversione che può essere parziale o totale (100% o 50/60%). In commercio ci sono efficienti dispositivi (e mediamente costosi) dedicati alla gestione dei motori; ne cito tre:
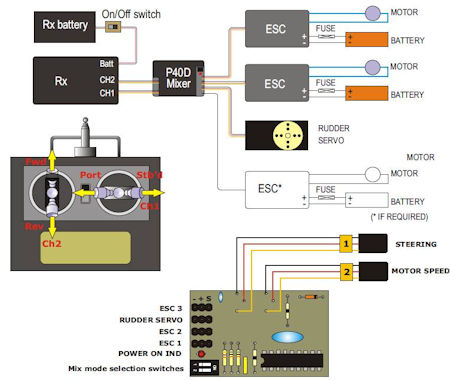
P40 Marine Motor Mixer
P94 Dual ESC/Mixer Multicontroller
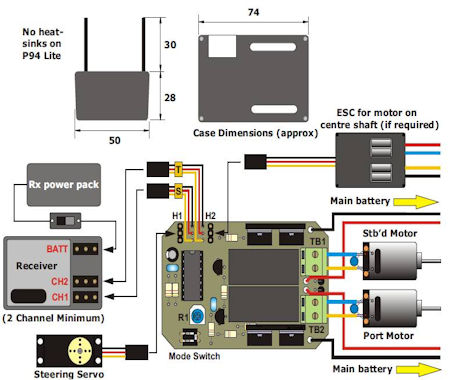
Come si può vedere dai due schemi entrambi i dispositivi possono gestire due o tre motori però con differenti metodologie; il primo, P40 (£ 28,00), a seconda del numero di motori, necessita di due o tre ESC ed altrettante batterie. Il secondo P94 (£ 79,00, che ho utilizzato sulla mia Smit Nederland), include nel medesimo dispositivo sia la gestione che i due ESC per il diretto pilotaggio dei due motori; di questo sistema da considerare la massima esemplificazione.
Tutti e due i dispositivi tramite dei dip switch permettono la gestione motori in quattro diversi modi che sono :
- Tank: per migliorare la virata uno dei due motori viene bloccato
- 100%: uno dei due motori cambia direzione di moto mantenendo lo stesso numero di giri dell’altro motore
- 50%: uno dei due motori cambia direzione di moto ma alla metà dei giri dell’altro motore
- Bow Thruster: il pilotaggio di due o più thruster ( eliche di manovra) da far lavorare nella stessa direzione o in direzioni opposte .
Rudder Mixer
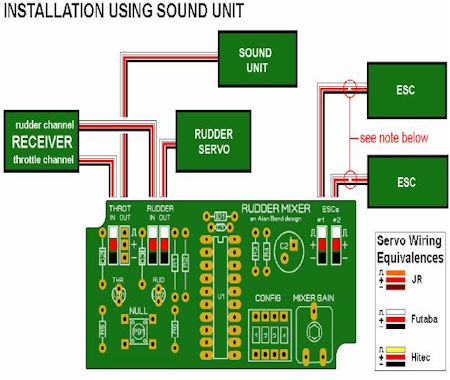
Il Rudder Mixer (£ 30,00) è simile al P40 perché ha bisogno per pilotare i motori di due ESC ( regolatore di velocità) ma necessita di una sola batteria; da notare che tutti e tre i dispositivi possono pilotare anche unità suono motore, mio consiglio MK2 (£ 52,95 montata sulla mia Smit Nederland) e MK3 (£ 32,00) due unità veramente realistiche e programmabili.
Suoni ovvero la “voce” del motore e non solo
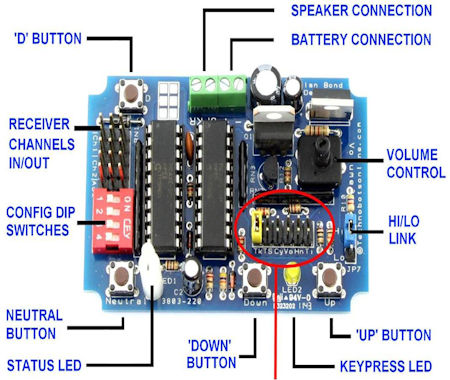
MK2 e MK3 sono le due unità suono delle quali posso parlare per averle utilizzate entrambe; una delle due, la Programmable Engine Sound System MK2 è quella che equipaggia la mia Smit Nederland. Sono entrambe unità facilmente programmabili, dal numero dei cilindri al tempo di stallo, la voce stessa diesel o benzina, il numero dei cilindri, etc perché ogni unità permette di scegliere almeno tra molte possibilità, sono entrambe amplificate (max. 3wats su 8ohm), lavorano a 12volts. Questa a seguire è la MK2 dove si può vedere la grande varietà di possibili regolazioni e collegamenti; di seguito allego anche un possibile schema di collegamento:
MK2
MK3

I dip switch cerchiati in rosso selezionano i parametri del motore come velocità massima, tempo di inattività del motore prima di fermarsi, “voce”, cilindri, etc. La MK3 e sostanzialmente simile; si differenzia essenzialmente per il volume non regolabile e per il sistema della programmazione.


Questo a mia conoscenza, quello che si può reperire facilmente sul mercato; se a qualcuno interessa posso fornire dove e come acquistare. Ci sono poi sistemi “autoctoni” di gestione motori che di seguito tratteggerò.
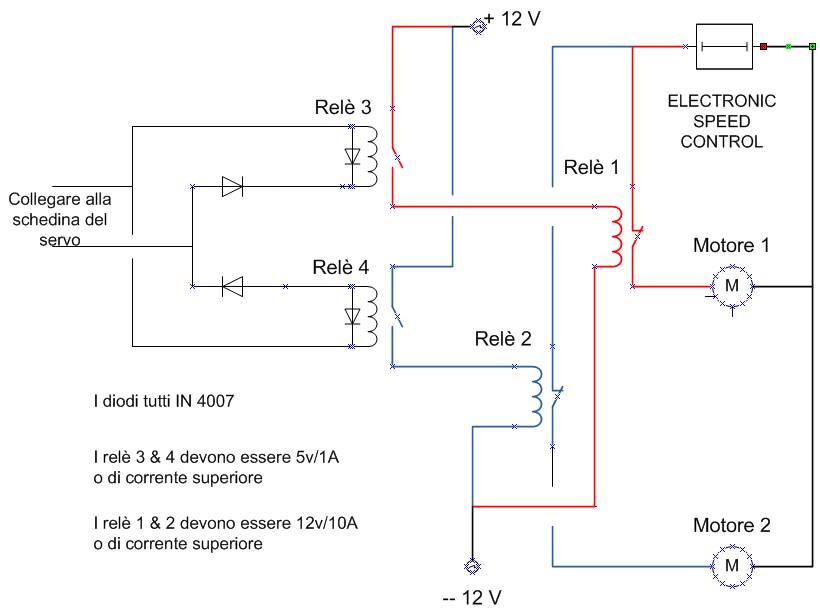
Metodo in fase 100%
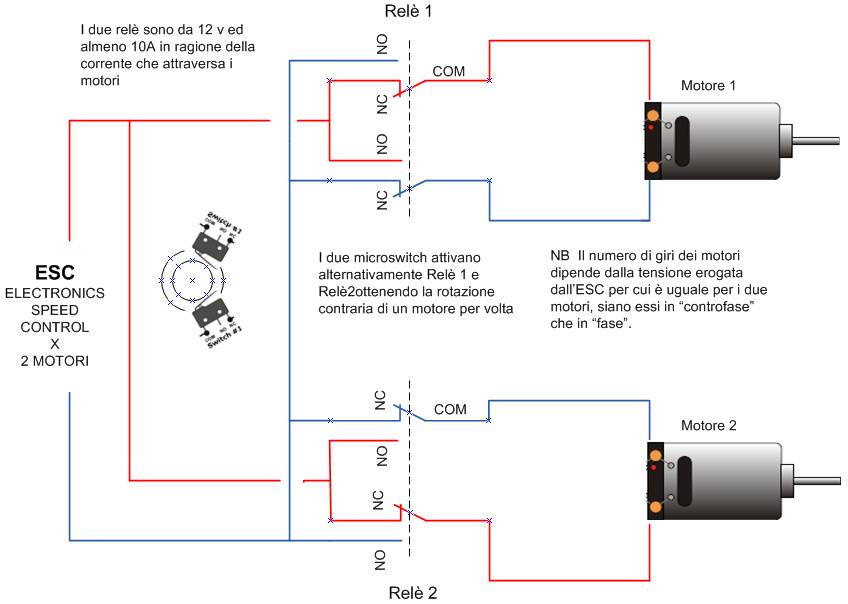
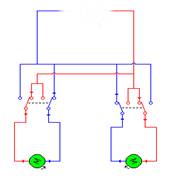
I fili blu e rosso sono i terminali di un ESC (regolatore di velocità); i due micro switch sono azionati da una camme montata sull’albero di un servo collegato in parallelo a quello del timone e fanno commutare autonomamente ed in sincrono con il movimento del timone i due relè.
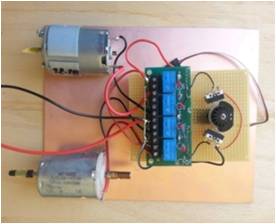
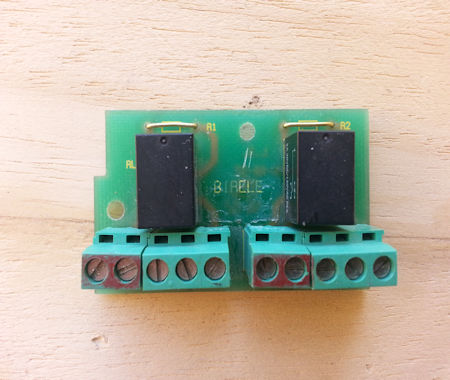
I relè dovranno essere a doppio scambio ed in grado di commutare le correnti che scorrono nei motori; i due motori, normalmente in “controfase”, se commutati gireranno entrambi a destra piuttosto che a sinistra e con eguale numero di giri. Lo svantaggio di questo circuito è quello di dover commutare le forti correnti che scorrono nei motori; il vantaggio, come già detto, è di poter, sia pure ad eguale numero di giri, mettere in “fase” i due motori. Allego foto del prototipo realizzato con parti di recupero.
Metodo Tank 0%
Questo metodo ricalca il modo di sterzare dei carri armati ovvero viene interrotta l’alimentazione di uno dei due sistemi di trasmissione e quindi il mezzo ruota facendo perno sul cingolo fermo; possiamo applicare lo stesso principio ai due motori del nostro battello senza alcun problema. Vediamo come.
1°Circuito: Lo stesso circuito precedentemente illustrato con un minimo di cambiamenti può divenire un buon sistema “tank”. Basterà sostituire i relè doppio scambio con relè mono e con essi interrompere i collegamenti tra ESC ed i due motori.
2° Circuito : Dal cassetto degli avanzi prendiamo un vecchio servo, togliamo le quattro viti del fondo e scolleghiamo il motorino; ai due fili della schedina colleghiamo il circuito elettrico assemblato come da figura. Colleghiamo il servo in parallelo a quello del timone con un cavetto Y” ed il più è fatto.
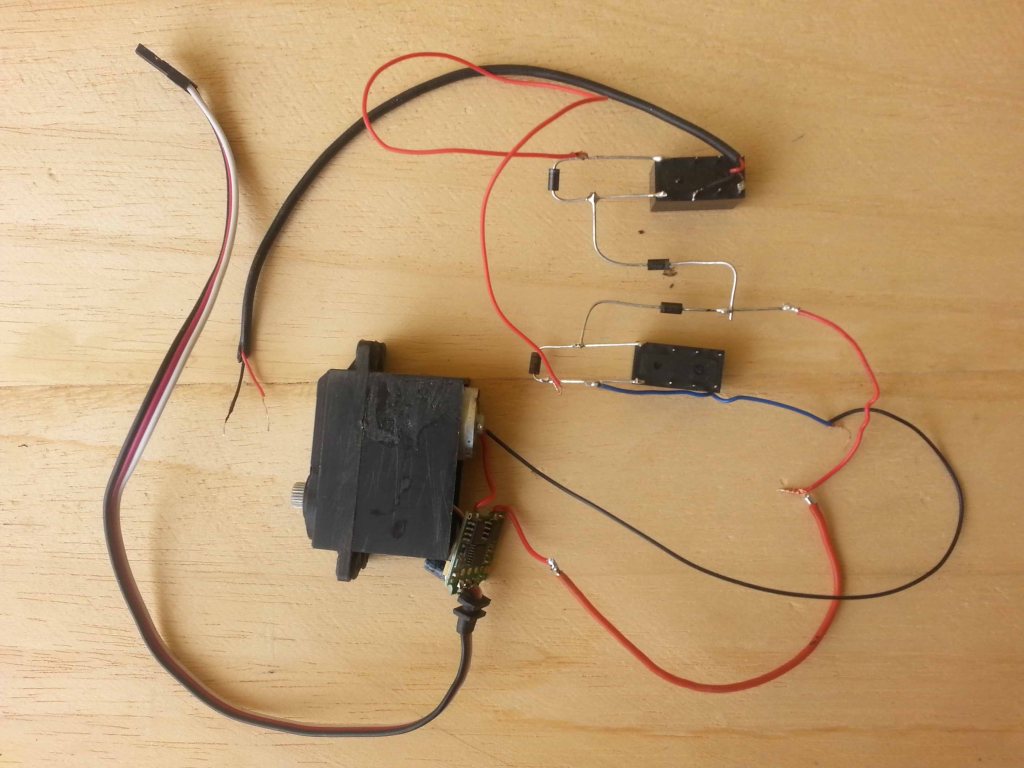
I quattro diodi potranno essere 1N4001….1N40007, i relè R3 R4 dovranno avere una resistenza di circa 500 ohm. Anche di questa idea ho realizzato il prototipo ed è funzionante; ve lo mostro ma senza i due relè di potenza R1 R2 da dimensionare in base alla corrente assorbita dai motori. E’ un vero errore da non copiare. Nel primo circuito la posizione dei micro switch determina il momento di attacco del sistema invertente; in questo secondo circuito è il valore della tensione in uscita dalla schedina del servo a far commutare i relè. L’azionamento del timone, copiato dal secondo servo, comporterà ai capi dei cavetti in uscita dalla schedina del servo “slave” la variazione della tensione tra +5v e -5v ; a seconda del valore e del segno della tensione uno dei due relè da 1amp si ecciterà portando i 12v ad uno dei relè di alta potenza ottenendo lo sgancio della alimentazione di uno dei due motori. Otterremo così un sistema “tank” dei più semplici da realizzare.
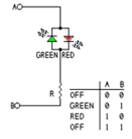
A titolo puramente informativo vi segnalo il “led bipolare bicolore” , un componente molto utile. Tale led da utilizzare come gli altri led e quindi con resistenza di carico, se collegato tra i poli dei motori, a seconda della polarità della tensione applicata, fornirà una luce di un colore definito (normalmente verde/rosso). Questo semplice accorgimento ci permetterà di vedere se i motori girano in “controfase” o in “fase” senza dover utilizzare il tester. Ai punti A e B si potrà applicare indifferentemente una tensione positiva o una tensione negativa.
In tutte queste mie digressioni non ho parlato di un eventuale terzo motore perché questo non viene coinvolto dai movimenti del timone.
Per battelli con eliche di manovra il discorso si fa più complicato ma non irrisolvibile. L’elica di manovra, che può essere detta prodiera (bow thruster) o poppiera (stern thruster) a seconda della collocazione, è un dispositivo di propulsione trasversale incorporato e montato a prora od a poppa di una nave o di una imbarcazione per renderla più manovrabile. Potrà essere l’argomento di una prossima chiaccherata.
Per ulteriori chiarimenti e informazioni contattare l’autore dell’articolo all’indirizzo mail: masilca@libero.it
